GNSS for Precion Guided
Weapons
[ GNSS-Guided Munitions Overview]
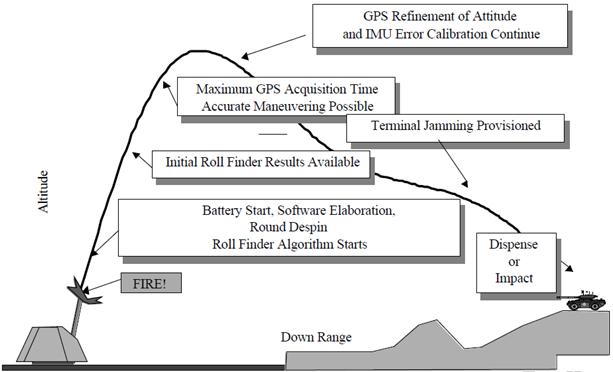
- GPS acquisition window
[GNSS Reception on
Projectiles]
• High seed: 1000m/s -> 5kHz Doppler shift @ 1.5GHz
• High spin: 200rps -> 500Hz Doppler, 100º phase shift @ 1.5GHz -> not much effect on the code signal? performance qualification at high spinning test fixture. Mayflower GPS receiver and anti-jam unit in high-spin performance test.

[ GNSS Receiver
Operational Sequences]
1) Initialization: from the external reference gun GPS receiver and the local mission fire control station.
- Data transfer for hot start.
- GPS time for direct Y-code acquisition, power-on for initialization, initialization data, almanac and precise ephemeris for all SVs in view, SAASM and cryptographic keys, the gun position, target coordinate, calibration of the projector GPS reference oscillator, reference trajectory and velocity aiding data. The receiver clock is set to within 10ms (10us) of GPS Time (the smaller, the faster the acquisition)
- Maintain the initialization data accurately.
- Initialization time: minimized for high rate of fire. < 3s.
2) Hold
- Initialization power is removed ant the GPS receiver is powered by the time maintenance power.
- Hold time (time maintenance interval): time from initialization to firing. a few seconds to 20min., the ref. osc. accuracy is crucial in maintaining GPS time accuracy. GPS receiver maintains initialization data set, the keys, and GPS time.
3) Firing and Acquisition
- On firing, the main battery powers the GPS receiver.
- Power-up self-test is done.
- The receiver starts to capture GPS signals
4) Fast Acquisition
- Limit the 2D search space (time=code, frequency=carrier) with hot start (initialization)
- Time search: code correlation matching
- Frequency search: for carrier phase reference (a replica of carrier phase and phase rate of the received signal) to successfully phase-demodulate the GPS signal. a variation of phase-locked loop called Costas loop is used. Acceptable error is about equal to the Costas loop bandwidth (less than 10Hz).
- Minimize freq. uncertainty: primary contribution
- Frequency uncertainty: accuracy of reference oscillator + Doppler shift caused by projectile movement (linear movement (5kHz) and spin (0.5kHz))
- Receiver's reference oscillator's freq. accuracy is very critical: reduces both time and frequency search space.
- Gun shock-induced frequency shift (the largest contributor) of the reference oscillator is accurately calibrated: removes the crystal aging and temperature-induced drift. calibration is done during initialization
using GPS Time.
- Use the accurately calculated projectile trajectory versus time for Doppler frequency fix (frequency fix): use all available initialization data - gun position, firing azimuth and elevation, muzzle velocity, drag,
planned flight trajectory, elapsed time since firing to estimate the projectile velocity.
- Minimize time uncertainty:
- Use accurate projectile position
- Calibrate out the receiver clock bias to GPS Time: within 10us at initialization.
- The receiver clock uncertainty at start-of-acquisition is the product of the receiver oscillator frequency uncertainty and the time maintenance interval (up to 20 minutes). The frequency stability of the
receiver oscillator over this interval is a major factor in minimizing acquisition time since it affects both time and frequency uncertainties. The primary contributor to oscillator drift is changes in temperature.
The receiver is equipped with a temperature sensor. Sensed changes in temperature are used to compensate the time keeping for known oscillator drift characteristics
- Fast correlation
- Use the best current estimate of projectile position, projectile velocity, receiver clock bias, and osc. freq.
- Use massive parallel correlation.
- Acquire 1st SV and use the information from it to reduce time and freq. uncertainty in subsequent SV acquisition.
- Use many channels (more than 6)
- Do correlation in massively parallel fashion: 100,000 effective correlators
- Realize the highest SNR:
- Minimize the hardware and software implementation losses: noise figure, filter loss, sampling loss, image rejection, signal aliasing, rejection of in-band spurious responses.
- Limit noise: minimize RF input bandwidth and tracking loop bandwidth
- Fastest possible acquisition in the presence of jammers close to the flight path.
5) Independent L1 and L2 reception
6) Anti-jamming
- Jamming effect: reduction of SNR
- Retain the best SNR: minimum implementation loss, noise figure, filter losses, sampling losses, image rejection, signal aliasing. down conversion frequency plan free of in-band spurious responses.
- Jammer sensor suite: jammer signal level and bandwidth. on board the GPS receiver.
- Optimally adjust receiver parameters: coherent/non-coherent detection integration intervals, tacking loop bandwidth, signal sampling weights and spacing.
- Use antenna beam switching/nulling: use multiple antenna configuration.
- Separate L1 and L2 tracking channels: do not use the same down converter and multiplex it between L1 and L2. SNR loss proportional to the dwell ratios with commensurate loss in tracking threshold. increased likelihood of carrier cycle slip or drop clock.
- Omni-directional antenna: limited anti-jam performance, poor sky/ground signal separation (jamming from ground)
7) Using IMU measurements to aid GPS
- IMU derived projectile dynamics → used in GPS to limit search space. used to reduce the bandwidth of the tracking loop. improved S/N and reduced acquisition time → stronger anti-jamming performance.
- IMU data available quite a moment after firing: IMU depends on GPS to align itself in flight.
- IMU data latency: conversion time of raw inertial IMU data into satellite line-of-sight range, range rate and range acceleration. held less than 20ms.
8) SAASM (Selective Availability Anti-Spoofing Module)
- Mandatory in battle field operation.
- Use a dedicated ASIC chip: 40mmx40mm MCM package.
- GPS receiver output is routed to SAASM chip input. Output of SAASM chip is SV navigation message.
- Construction; GPS ASIC with 12 tracking channels each capable of tracking L1 or L2, C/A or P/Y-code, acquisition correlator ASIC, key data processor chip set, flash memory for DSP program storage.
10) Antenna switching: antenna with a null in the forward direction -> good for anti-jam capability antenna with an omni-directional pattern -> good for capturing many GPS signals.
11) High spinning projectile environment
- General receiver could find the fix only at low spin (< 6Hz). Spinning causes amplitude and phase modulation of received GPS signal. High spinning causes the satellites unlocked. Once unlocked the receiver should reacquire the satellite in a very short time which decreases with the spin rate.
- The following are remedies.
- Projectile de-spinning
- Antenna switching
- Amplitude and/or phase tracking of modulation caused by spinning [Xiao, Int. Conf. Mechtron. Automat., IEEE, Agu. 2007], [Doty, GPS World, Sept. 2004].
- Use rotation demodulator: one antenna + one receiver, multiple antennas + corresponding receivers for each antenna
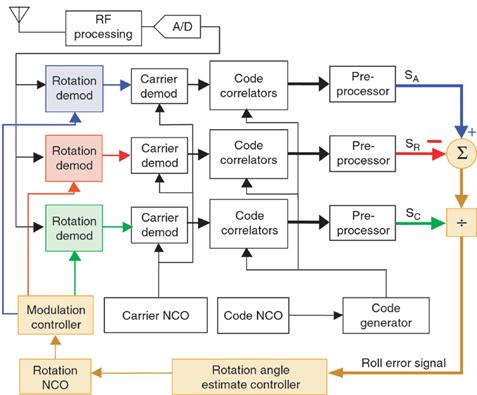
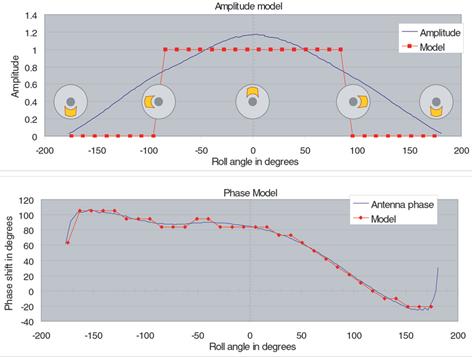
-Actual amplitude & phase of rotating antenna (blue), amplitude and phase of rotation demodulator output
- Spin fixture: for live testing of GPS reception on high-spin
- GPS receivers with high-dynamic/spin capabilities are specially developed:
- Rockwell-Collin ASVN(Advanced Spinning-Vehicle Navigation) development team
- Mayflower Communications, L3 IEC, BAE Systems 'NavComp'
12) GPS-derived projectile spin measurement:
- Rotational orientation (attitude) of a fast spinning body is required for correcting the effect of spinning body in the sensor inputs and guidance actuator controls.
- Because the inertial sensors are spinning collectively with the projectile, they must be demodulated to remove rotational artifacts to that Coriolis and lateral acceleration components can be utilized in the trajectory solution.
13) Telemetry: during test firings only and not used in operational rounds since emitting RF signal is dangerous in battle field.
14) Packaging:
- Form factor that fits into projectile nosecone.
- Initialization coupler, GPS antennas, IMU, guidance computer, batteries, power regulator, GPS receiver, telemetry and its antenna (test model)
 (ERGM GPS receiver)
(ERGM GPS receiver)
[GNSS Receivers]
• Common:
- PPS(precise pos. serv.) units(P-code): exportable only to GPS Memorandum of Understanding Countries
- PPS security module (Y-code): obtained through Foreign Military Sales(FMS) procurement
- Freq.: L1 C/A and P or Y, L2 P or Y
- Greater accuracy with 24 channels.
- Dynamics > 10g
• Direct Y-code acquisition:
- Accurate time transfer to the receiver (initialization), time maintenance using a stable oscillator, massively parallel correlator
- Small time error: leads to large code search space
- 32,000 time-frequency bins in parallel
- Operational conditions: acquisition probability 0.9, initial time error ±1ms, initial frequency error ±0.2ppm, J/S 50dB, 20.46MHz signal bandwidth
- Merits of direction acquisition of Y-code: higher tolerance to broadband and CW jamming
- Code search resolution cell (code phase search): 1/2 PN chip. In the worst case, all the resolution cells in the entire uncertainty region must be tested before the signal is detected. Statistically half of the total number of resolutions cells must be tested. 511 resolution cells in time are tested in parallel. Code phase search is same as shifting the phase of the replica PRN code generated by the receiver until it correlates with the received satellite PRN code.
- Frequency search resolution cell (carrier phase search): reciprocal of the coherent integration period, use FFT to extend 511-time resolution cells to 64-frequency resolution cells. 511x64 = 32704 time-frequency resolution cells. Carrier phase search is same as changing the receiver frequency until it correlates with the received satellite carrier frequency plus Doppler.
- Products: STS Y-Express,
• Rockwell-Collins NavStorm Artillery G-Hardened GPS Anti-Jam System: 12-ch., artillery, enhanced direct Y-code acquisition/cold start, SAASM, high-rate aiding, 80-90dB J/S performance scalable anti-jam, up to 4 RF signal inputs, single(L1 or L2) or dual (L1 & L2) freq. tracking, high-g vib. & shock, field clock recalibration for extended storage, 6000 correlators with Panther ASIC, high anti-jamming immunity, antenna masking selection, precision time transfer, simultaneous ionospheric correction, carrier loop aiding(in future upgrade), carrier phase measurement output, fast initial acquisition, extended range correlation(in future upgrade); TTFF = 77s cold start w/o initialization data, < 25s with time uncertainty less than 25ms, < 8s with time uncertainty less than 10us; designed for high-g shock; used in ERGM RR, CMATD, Team STAR, LCCCM

• Rockwell-Collins NavStrike 3.3 Munitions Receiver: 12-ch., JDAM, enhanced direct Y-code acquisition/cold start, 5th generation SAASM, single(L1 or L2) or dual (L1 & L2) freq. tracking, high-g vib. & shock, field clock recalibration for extended storage, 6000 correlators with Panther ASIC, high anti-jamming immunity, antenna masking selection, precision time transfer, simultaneous ionospheric correction, carrier loop aiding(in future upgrade), carrier phase measurement output, fast initial acquisition, extended range correlation(in future upgrade); TTFF = 77s cold start w/o initialization data, < 25s with time uncertainty less than 25ms, < 8s with time uncertainty less than 10us; Shock 386g
• Mayflower Gun-Hard C/A Code GPS Receiver: 12-ch., embedded data link, embedded anti-jam with Mayflower patented ATF technology, digital/RF interface to Mayflower anti-jam solution, gun-hardened at 20,000g, interface to passive antenna arrays (up to 4 elements), 10mCEP, size 40mm dia., TTFF = 15s(hot), 38s(warm), 50s(cold), hot start TTFF tested in high-speed spinning applications, used in GIF and BTERM II
• Mayflower NavAssureTM 100 SAASM GPS Receiver: L1 and L2, 12-ch., up to 4 antennas, 20kg gun hardened, 40mm dia.
• IEC (L-3 Comm. subsidiary) TruTrak Evolution (TTE) GPS receiver
-Anti-jamming: 4s acquisition at 55dB J/S, track at 65dB J/S and at 90dB J/S with optional FaSTAP(with Deep Integration with IMU)
-Accuracy: 3m(1 sigma) pseudorange, 0.025m (1s) delta range
-TTFF: <6s (direct Y, hot start, no jamming), <5s (reacquisition)
-Navigation: unfiltered GPS-only least squares, deeply integrated Kalman filter, IMU-less attitude determination
-Hardware: 24-ch., L1 C/A, L1 & L2 P(Y), 4 embedded processors, synchronization on pulses, 0-100,000ft altitude, 20kg 16ms gun setback, 5kg 1ms lateral balloting
-Dynamics: <1200m/s velocity, < 10g acceleration
-Used in PGK and Excalibur.